Hankkeen eteneminen, toteutuksen osien testaus ja jatkokehitys.
Kirjoittajat: Mirka Hienonen & Tuomas Herranen
Hanke on edennyt tasaisesti kesän ja alkusyksyn aikana, ja tiimimme on saanut arvokasta lisävahvistusta: joukkoomme on liittynyt 2D-artisti (UI/UX-spesialisti), 3D-artisti sekä robotiikan asiantuntija ja metsäalan projektityöntekijän, joka auttaa virtuaalisten tehtävien suunnittelussa.
2D-artistimme ansiosta sekä Metsä VR, Virtuaalinen luokkahuone että Kalustonhallintasovellus ovat saaneet uuden ja päivitetyn ilmeen. 3D-artistimme vastaa puuston ja kasvien mallinnuksesta referenssikuvien pohjalta sekä metsäkonesimulaation koneiden realistisesta ilmeestä, hyödyntäen myös kehittämäänsä Blenderin Geometry Nodes -järjestelmää mallinnuksen tehostamiseksi. Näin ympäristöt saavat kiillotetun ja ultrarealistisen ilmeen, mukaillen reaalimaailman kohteita.


Metsä VR – TP1
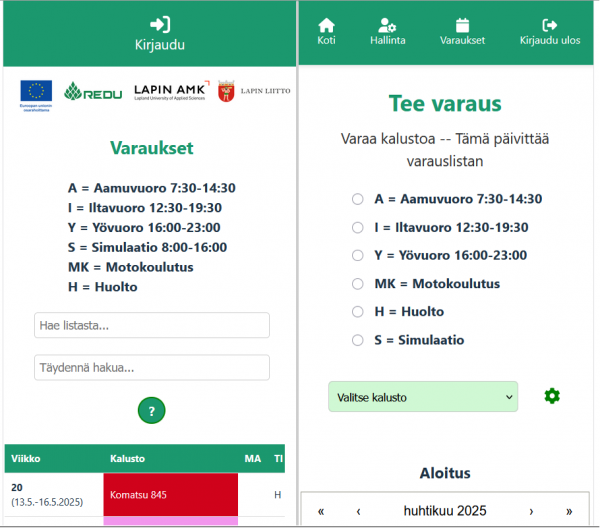
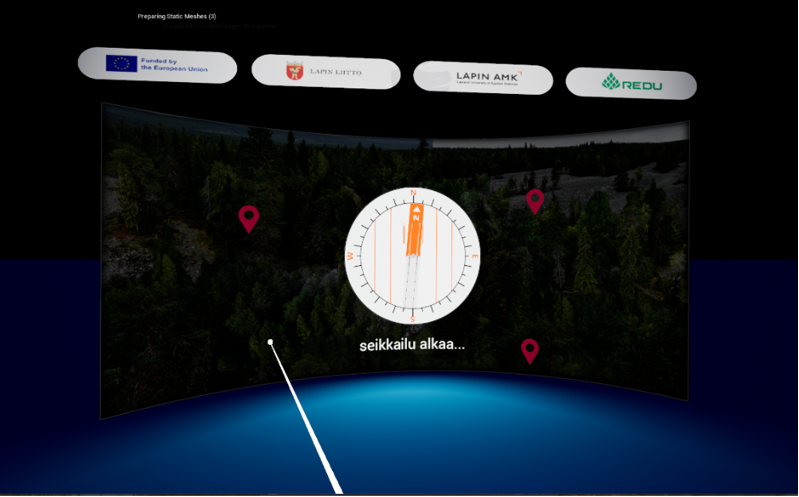
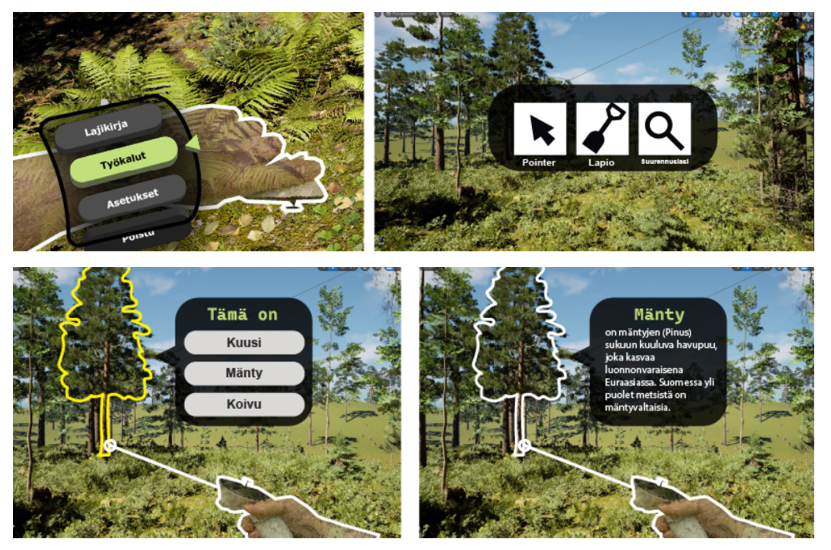
Metsä VR -sovellusta on kehitetty vaiheittain käyttäjätoiveiden mukaisesti, kokeilemalla eri ratkaisuja ja parhaita käytäntöjä. Menu on uudistettu, samoin aloitusnäkymä. Tällä hetkellä asetuksiin ja informaatiokenttiin pääsee rannevalikon kautta, ja kenttiin navigointi onnistuu aloitusnäkymässä olevan suuren kartan avulla. REDU:n ehdotuksesta karttanäkymään on lisätty pop-up-ikkuna, jonka kautta käyttäjä voi tarkastella aluetta laajemmin ennen siirtymistä siihen.
Virtuaalisen hahmon ranteeseen kiinnitetty menu mahdollistaa nopean ja miellyttävän tiedonsaannin kaikissa sovelluksen ympäristöissä, mikä syventää immersiota ja parantaa käyttökokemusta. Lisäksi Metsä VR:n osalta on alettu kartoittaa moninpelitoiminnallisuuden mahdollisuuksia REDU:n pyynnöstä, mikä avaa uusia näkökulmia oppimisen ja yhteistyön tukemiseen virtuaalisessa ympäristössä.

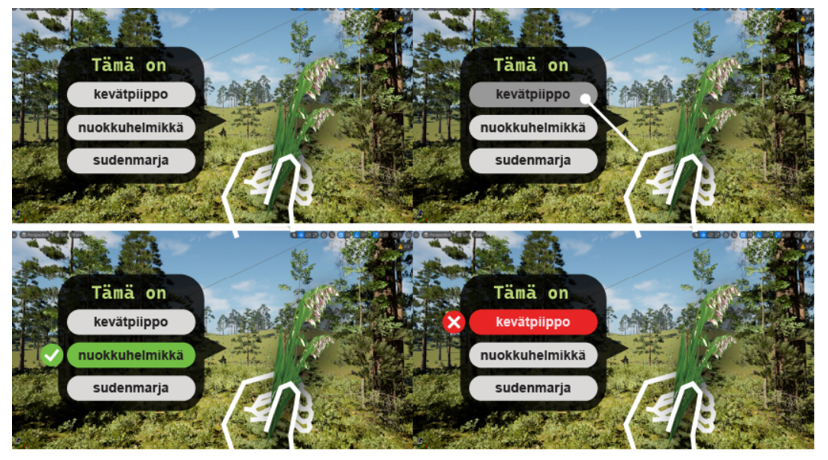
Virtuaaliseen ympäristöön on lisäksi suunnitteilla erilaisia opettavaisia tunnistustehtäviä, jotka kouluttavat opiskelijoita tunnistamaan luonnossa liikkuessaan eri lajeja, kuten puita, kasveja ja maaperätyyppejä.
Lisäksi osana sovelluksen kehitystä on alettu kartoittaa korkeusmallien käyttömahdollisuutta karttapohjien luomisessa, jotta ne mukailisivat mahdollisimman tarkkaan oikeita ympäristöjä. Sovellusta tullaan jatkossa laajentamaan myös moninpeliserverillä, joka parantaa sovelluksen käyttömahdollisuuksia.
Metsäkone VR – TP1
Metsäkone VR ympäristössä on hiottu moninpeliserverin toimintaa ja serverin päivitystä uusimpaan Unreal engine 5 versioon on aloitettu suunnittelemaan paremman suorituskyvyn saavuttamiseksi. VR ja desktop käyttäjien yhtäaikaisen käyttömahdollisuuden sisältävän moninpeliserverin toteutus osoittautui haastavaksi, mutta lopulta sen toteutus onnistui kuitenkin hyvin.
Seuraavaksi suunnitellaan ympäristön UI käyttöliittymää ja ensimmäistä halliympäristön prototyyppiä, jossa käyttäjät voivat tarkastella metsäkonetta ja sen komponentteja.
Pienkuormaajan turva-alue ja käyttö – TP2
Hankkeessa ovat aloittaneet myös kaksi uutta robotiikan asiantuntijaa, joiden ansiosta myös pienkuormaajan anturoinnin suunnittelu edistyy nopeasti. Pienkuormaajan turvallisen käytön varmistaminen on tällä hetkellä tutkimus- ja suunnitteluvaiheessa. Keskeisenä tavoitteena on määrittää kuormaajan työalueen turva-alueen tarkka laajuus sekä kartoittaa kaikki mahdolliset reitit, joista ihmiset tai esteet voivat päästä alueelle, mukaan lukien hallin neljä kulkuovea. Selvityksessä tarkastellaan muun muassa sitä, milloin kuormaajan tulisi varoittaa lähestyvää henkilöä äänimerkillä ja milloin hätäkatkaisin tulisi aktivoida estämään vaaratilanne kokonaan.
Tutkimuksessa arvioidaan eri anturivaihtoehtoja, kuten lähiantureita ja tutkia, jotta havaitseminen olisi luotettavaa eri etäisyyksiltä ja kulmista. Lisäksi selvitetään turva-alueen rajojen määrittämisen periaatteita: kuinka lähelle kuormaajaa henkilö voi tulla ennen kuin varoitus tai pysäytys aktivoituu, ja miten järjestelmä reagoi vaihteleviin esteisiin ja liikkeisiin. Tämän vaiheen tavoitteena on muodostaa riittävän turvallinen, mutta käytännössä toteuttamiskelpoinen ratkaisu, jonka pohjalta voidaan myöhemmin toteuttaa konkreettinen turvajärjestelmä.
Kalustonhallintasovellus – TP3
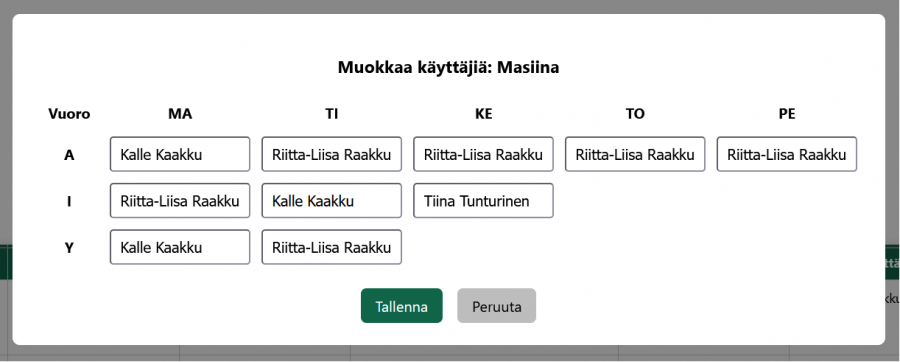
Kalustonhallintasovellusta on kehitetty vaiheittain, ja siihen on testattu versiot 1.0, 2.0 ja 3.0 ennen tuotantoon siirtymistä. Sovellus on päivitetty REDU:n toiveiden mukaisesti. Poissaolomerkintöjä on yksinkertaistettu, ja taulukkoon on lisätty sarake poissaolojen syiden merkitsemiseksi. Lisäksi sovellukseen on lisätty infokenttä, jonka avulla käyttäjille voidaan viestiä ajankohtaisista asioista.

Varauksia voidaan nyt muokata joustavasti, esimerkiksi vaihtamalla varatulle päivälle uusi käyttäjä sairaustapauksen vuoksi. Sovellus on käynyt läpi myös 2D-artistimme, joka toimii samalla UI/UX-spesialistina, arvion. Arvioinnin seurauksena käyttöliittymän käytettävyyttä on parannettu ja visuaalista kontrastia säädetty, jotta se yltää parhaimmillaan AAA-luokan saavutettavuusstandardeihin.
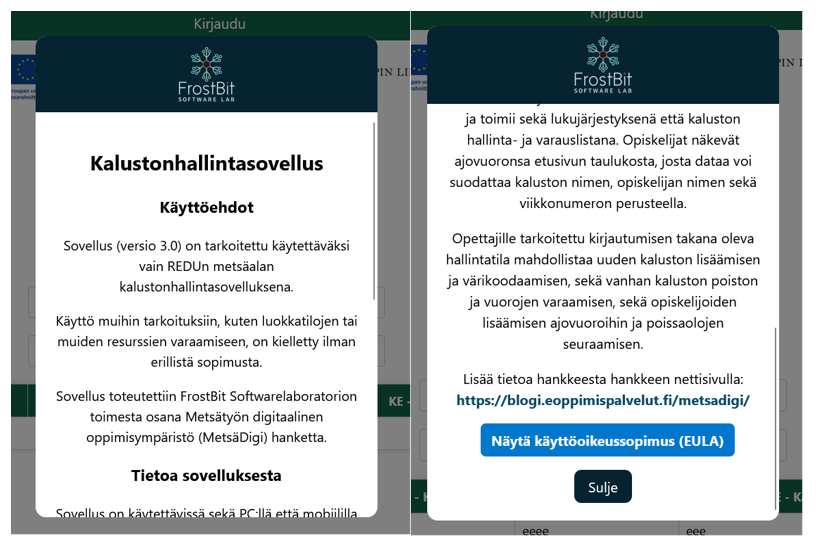
Sovellukseen on lisäksi lisätty lisenssi ja käyttöehdot, joita voidaan palata tarkastelemaan infoikkunan kautta. Samaa kautta pääsee suoran linkin kautta hankkeen sivuille, jotka tarjoavat yleiskatsauksen hankkeen sisällöstä ja tarkoituksesta, sekä päivityksiä hankeen etenemisestä.
Metsäkoneen kuljettajan etäohjausjärjestelmä – TP3
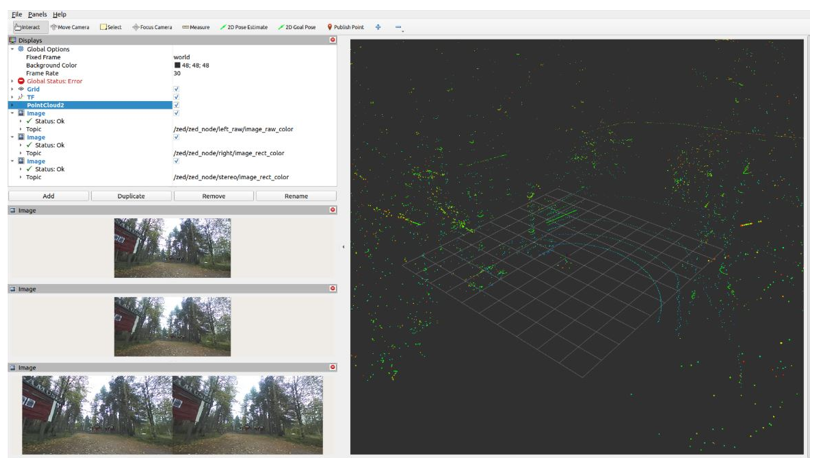
Toteutukseen tarvittavien anturien valinta ja määrittäminen alkaa olla valmista ja seuraava vaihe on järjestelmän ensimmäisten prototyyppien kehitys. Metsäkoneen teollisuus PC:n testaus on aloitettu ja projektiryhmä on luonut ensimmäisen datasetin, joka sisältää kamera ja LiDAR anturien dataa. Seuraavaksi datasettiä hyödynnetään puunrunkojen automaattisen tunnistuksen selvittämiseen reaaliaikaisen harvennustiheyden määrittämiseksi.
Lisäksi projektiryhmä on aloittanut ajoura-avustimen prototyypin suunnittelun aloittelevan metsäkoneen kuljettajan avustamiseen. Ominaisuuden kehitys vaatii tarkkaa paikantamista ja eri anturien hyödyntämistä.