Ville Eloranta, insinööri (AMK), asiantuntija, Älykäs rakennettu ympäristö, Lapin ammattikorkeakoulu
Lapin AMKissa tutkittiin osana kansainvälistä DIT4BEARs-hanketta vuosina 2020–2023 porojen paikannukseen liittyviä menetelmiä ja laitteita tieturvallisuuden parantamiseksi. Hanke oli rahoitettu Kolarctic CBC 2014–2020 -ohjelmasta ja sen rahoittajana toimi Lapin liitto.
Hankkeen Lapin AMKin työpaketin tarkoituksena oli luoda porovaroitusjärjestelmä, jolla vähennettäisiin porokolareita. Hankkeen aikana kuitenkin selvisi, että markkinoilla oli jo useita poropaikannuslaitetoimijoita ja jokaisella oli omat sovelluksensa. Tästä syystä työpaketin tavoitteita muutettiin ja keskityttiin enemmän jo olemassa olevien järjestelmien yhdistämiseen ja parantamiseen. Suurimmat haasteet porojen paikannuksessa tieturvallisuuden osalta olivat paikannuksen tarkkuus ja paikannustiheys.
Satelliittipaikannus
Perinteinen GNSS-paikannus sisältää kolme vaihetta: signaalin vastaanotto, signaalin prosessointi ja paikkatiedon laskeminen. Vanhoissa järjestelmissä kaikki nämä vaiheet suoritetaan paikannuslaitteen sisällä. Signaalin prosessointi ja paikkatiedon laskeminen voidaan kuitenkin tehdä signaalin vastaanoton jälkeen myöhemmin. (Van Dierendonck, Al-Fanek & Petovello 2018.)
Uudenlaisessa snapshot-paikannustekniikassa laitteistoa tarvitsee käyttää päällä vain muutamia millisekunteja satelliittisignaalin vastaanottamiseen. Sen jälkeen paikannuksen muut vaiheet voidaan suorittaa käyttötapauksesta riippuen paikannuslaitteessa tai ulkoisella palvelimella. Tällöin järjestelmä ja sen energiankulutus ovat täysin kehittäjän kontrolloitavissa ja muokattavissa käyttötapauksen mukaan. Laitteen paristoa säästää, jos lopullinen paikkatieto lasketaan vasta palvelimella. (Van Dierendonck ym. 2018.)
Hankkeessa kokeiltiin Baseband Technologiesin snapshot-järjestelmää. Laite kuulosti lupaavalta, kunnes selvisi, että se oli ainoastaan paikannuspiiri. Siinä ei ollut mukana radiomoduulia, jolla paikannustietoja olisi voinut lähettää eteenpäin. Laitteeseen oli kytkettävä UART-väylää käyttävä erillinen radiomoduuli.
Baseband ilmoitti paikanninpiirilleen kestoaikaa 100 mAh:n paristolla yli vuoden (Baseband Technologies 2022). Todellisuudessa valmiin paikantimen kestoaika olisi lyhyempi, koska ilmoitetussa arvossa oli mukana ainoastaan paikannus, ei tietojen lähetyksiä eteenpäin radioverkkoon toisella moduulilla.
Testeissä radiomoduulina käytettiin Pycomin LoPy4-alustaa. Erilaisia LoRa-kehitysalustoja tutkiessa kävi ilmi, että LoPy4 oli energiankulutukseltaan huonoin vaihtoehto. Vähävirtaisin ja samalla halvin LoRaWAN-alusta oli Tlera Corp Grasshopper. (Ould & Bennett 2021, 3–4.) Niitä ei kuitenkaan ollut saatavilla testien aikaan vuonna 2022, joten testaus rajoittui ainoastaan LoPy4-laitteisiin.
Järjestelmäarkkitehtuurisesti testit onnistuivat, ja Basebandin piirillä saatiin paikkatieto. Ensin LoPy4:lle oli lähetettävä LoRaWAN-downlinkkina, eli verkosta laitteelle kulkevana viestinä, aikaleima, jotta paikannus voitiin suorittaa. Aikaleima ohjattiin UART-väylän kautta Basebandin piirille, joka pystyi saamaan satelliiteista paikkatiedon aikaleiman avulla. UART-väylän kautta paikannusdata ohjattiin takaisin LoPy4:lle ja siitä edelleen LoRaWAN-verkkoon. LoRaWAN-verkosta raakadata ohjattiin omaan erilliseen pilvisovellukseen, josta data lähetettiin Basebandin palvelimelle lopulliseen käsittelyyn. Basebandin palvelin palautti lopullisen paikkatiedon, jonka olisi voinut lähettää esimerkiksi puhelimen varoitussovelluksen kartalle.
Kuvassa 1 on vasemmalla puolella radiopiiri LoPy4 koekytkentäalustaan kiinnitettynä, ja se lähettää tietoa LoRaWAN-verkkoon. Oikealla puolella on Basebandin paikannuspiiri, joka on kytketty UART-väylään sekä digitaalisiin pinneihin, jotka ohjaavat paikantimen toimintoja.
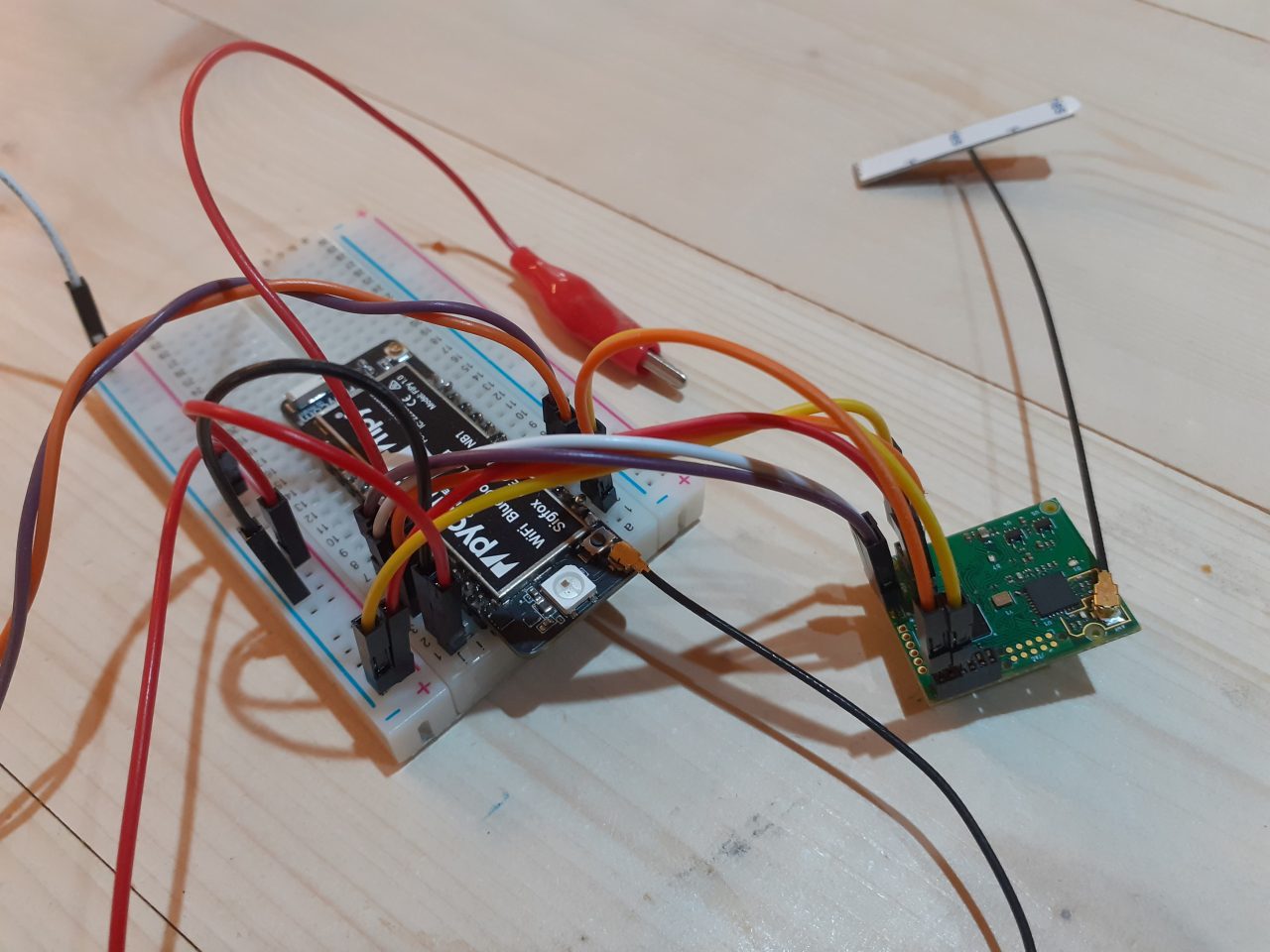
Kuva 1. Prototyyppi Snapshot-paikantimesta LoPy4:llä ja Basebandin piirillä
Tukiasemapaikannus
Vaihtoehtona satelliittipaikannukselle on olemassa tukiasemiin perustuva paikantaminen. Tukiasemapaikannusta voi käyttää muun muassa LoRaWAN-verkossa. Se on paikkatiedon osalta kuitenkin satelliitteja epätarkempi. Kun tukiasemien sijainnit tiedetään ja vähintään kolme tukiasemaa vastaanottaa lähetetyn viestin, verkon algoritmit pystyvät laskemaan paikan, josta viesti lähetettiin. Etuna tässä on, ettei paikannuslaitteessa tarvita erillistä piiriä paikannukseen, vaan ainoastaan radiolähetinpiiri. Tämä vähentää energian kulutusta laitteessa. (LoRa Alliance™ Strategy Committee 2018.)
Hankkeessa kokeiltiin tukiasemapaikannusta LoRaWAN-tekniikalla sekä omalla yksityisellä verkolla että valtakunnallisella Digitan LoRaWAN-verkolla. Oman verkon ongelmaksi muodostui tukiasemien kellojen synkronointi. Synkronointi vähintään mikrosekunnin tarkkuuteen on paikannuksen tarkkuuden osalta välttämätöntä, koska radioviestit kulkevat valon nopeudella noin 300 m/µs. Jos kellojen synkronointi on vain millisekunnin tarkkuudella, paikannuksen tarkkuus heikkenee jo useaan kilometriin.
Digitan valtakunnallisessa LoRaWAN-verkossa paikannus toimi paremmin, ja AMKin Rovaniemen kampuksen takapihalla paikannuksia saatiin noin 200 metrin säteellä. Alueella kuitenkin sijaitsi tarvittava määrä tukiasemia, jotta paikannus oli mahdollista. Kauempana Lapin erämaissa ei tukiasemia välttämättä ole riittävästi paikantamiseen. Paikoittain voi olla alueita, joissa ei ole edes yhtä tukiasemaa viestien välittämiseen. Lisäksi erilaiset maaston muodot vaikeuttavat LoRa-verkon toimintaa Lapissa. Tukiasemien pieni määrä on suurin ongelma niihin pohjautuvassa paikannuksessa.
Poronomistajien haastattelujen perusteella kävi ilmi, ettei tarkka sijainti ollut tarpeen tieturvallisuuden näkökulmasta. Liian tarkka satelliittipaikantaminen voisi aiheuttaa ilkivaltaa poroille ja paikannuslaitteille. Epätarkempi tukiasemapaikannus olisi riittävä, jos vain tukiasemia olisi tarpeeksi.
Paristotekniikat
Tieturvallisuuden näkökulmasta porojen paikannuksia tarvittaisiin huomattavasti nykyistä useammin. Miniminä voidaan pitää paikannusta kerran tunnissa. Kerran 15 minuutissa olisi vielä parempi. Nykyisten markkinoilla olevien laitteiden kerran päivässä/viikossa paikannustiheys on liian harva kattavan varoitusjärjestelmän luomiseen. Jotta paikannustiheyttä saisi suurennettua, olisi laitteiden energiankulutuksen pienennyttävä tai akkujen kapasiteetin kasvettava. Hankkeessa tutkittiin erilaisia paristotekniikoita, millä pyrittiin kasvattamaan kapasiteettia.
Hankkeen tutkimusten aikaan vuonna 2021 markkinoiden kertakäyttöisten paristojen paras energiatiheys oli litium-tionyylikloridiparistoilla (Li-SOCl₂). Se oli 430–710 Wh/Kg riippuen pariston fyysisestä koosta. Muilla Li-ion-paristoilla energiatiheys oli 100–300 Wh/Kg ja alkaliparistoilla 100–160 Wh/Kg. Energiatiheyksien perusteella oli selvää, että kannatti yrittää käyttää LTC-paristoja.
Kaupallisiin paikantimiin ei kuitenkaan ollut helppo vaihtaa paristoa, jota niihin ei ollut suunniteltu. LTC-pariston nimellisjännite oli 3,6 V. Jos paikannin oli suunniteltu käytettäväksi kolmella sarjaan kytketyllä nimellisesti 1,5 V:n paristolla, paikannin saattoi juuri ja juuri alkaa toimimaan yhdellä LTC-paristolla. Jos sarjaan kytkevän paristokotelon muutti rinnan kytkeväksi, mahtui samaan tilaan kolme kertaa enemmän paristokapasiteettia. Toiminta oli kuitenkin epävarmaa ja mahdollisesti laitteelle vaarallista, koska 3,6 V oli reilusti alle suunnitellun noin 5 V.
Jos laite oli suunniteltu käytettäväksi alle 3,6 V:n jännitteellä, pariston päivitys oli mahdollisempaa. Tämä vaati kuitenkin jännitteenmuuntopiirin, jotta laitteisto kesti pariston suuremman jännitteen. Tämä taas vaati enemmän tilaa, mutta oli muuten testattavissa.
Hankkeen aikana markkinoilta löydettiin paikanninlaite, johon tämän muutoksen olisi voinut tehdä. Muutoksen vaikutuksia ei kuitenkaan ollut mahdollista saada selvillä hankkeen aikana. Laitteen pariston kapasiteetti oli 800 mAh ja fyysisiltä mitoiltaan samankokoisen LTC-pariston kapasiteetti 1200 mAh. Laitteen kestoaika tällä 800 mAh -paristolla oli valmistajan mukaan viisi vuotta. Paristoa vaihtamalla kestoaika olisi pidentynyt teoreettisesti 7,5 vuoteen, mikä ei ollut hankkeen näkökulmasta mahdollista eikä tarpeellista tutkia.
Erään laitevalmistajan ratkaisu paikannustiheyden kasvattamiseen oli puhtaasti akkukapasiteetin lisääminen. Tämän valmistajan laite pystyi vuoden ajan paikannuksiin neljä kertaa tunnissa, mutta käytti lähes 700 gramman painoista akkua. Tämä oli todella raskas ratkaisu, eikä se saanut kannatusta poronomistajilta.
Hankkeen aikana suoritettiin myös virrankulutusmittauksia markkinoiden valmiille paikanninratkaisuille. Kävi ilmi, että markkinoilla jo olevat laitteet olivat yhtä vähävirtaisia kuin valmistajat ilmoittivat. Tämän vuoksi hankkeessa ei ollut järkevää jatkaa uuden paremman paikantimen rakentamista, vaan keskittyä enemmän ekosysteemin parantamiseen valmiiden toimijoiden välillä.
Energian keräys
Paristotekniikoiden lisäksi hankkeessa tutkittiin energiakeräimiin perustuvaa ratkaisua paikannuslaitteiden akun keston pidentämiseksi. Tutkimuskohteena oli paikanninpanta, joka lataisi itse akkunsa poron ruumiinlämmöstä termoelektrisillä moduuleilla. Näitä moduuleja olisi asennettuna pannan sisään, ja sähkö syntyisi lämpötilaerosta poron ja ulkoilman välillä.
Porotilavierailulla kuitenkin selvisi, ettei poron turkki päästänyt lämpöä ulospäin. Lämpötilaeroa ei muodostunut pannan sisä- ja ulkopintojen välille, joten sähköä ei voinut syntyä. Sen sijaan poronomistajien keskuudessa oli kiinnostusta liikkeeseen perustuvasta keräimestä, koska porot ovat jatkuvasti liikkeessä. Tätä ei kuitenkaan hankkeen aikana ehditty testata, ja se jää seuraavien hankkeiden tutkittavaksi.
Kuvassa 2 on prototyyppiversio termoelektrisestä kaulapannasta. Sen sisään on asennettu termoelektrisiä moduuleja, jotka tuottavat sähköä lämpötilaerosta pintojen välillä. Panta on päällystetty alumiiniteipillä lämpötilan jakamiseksi tasaisemmin.
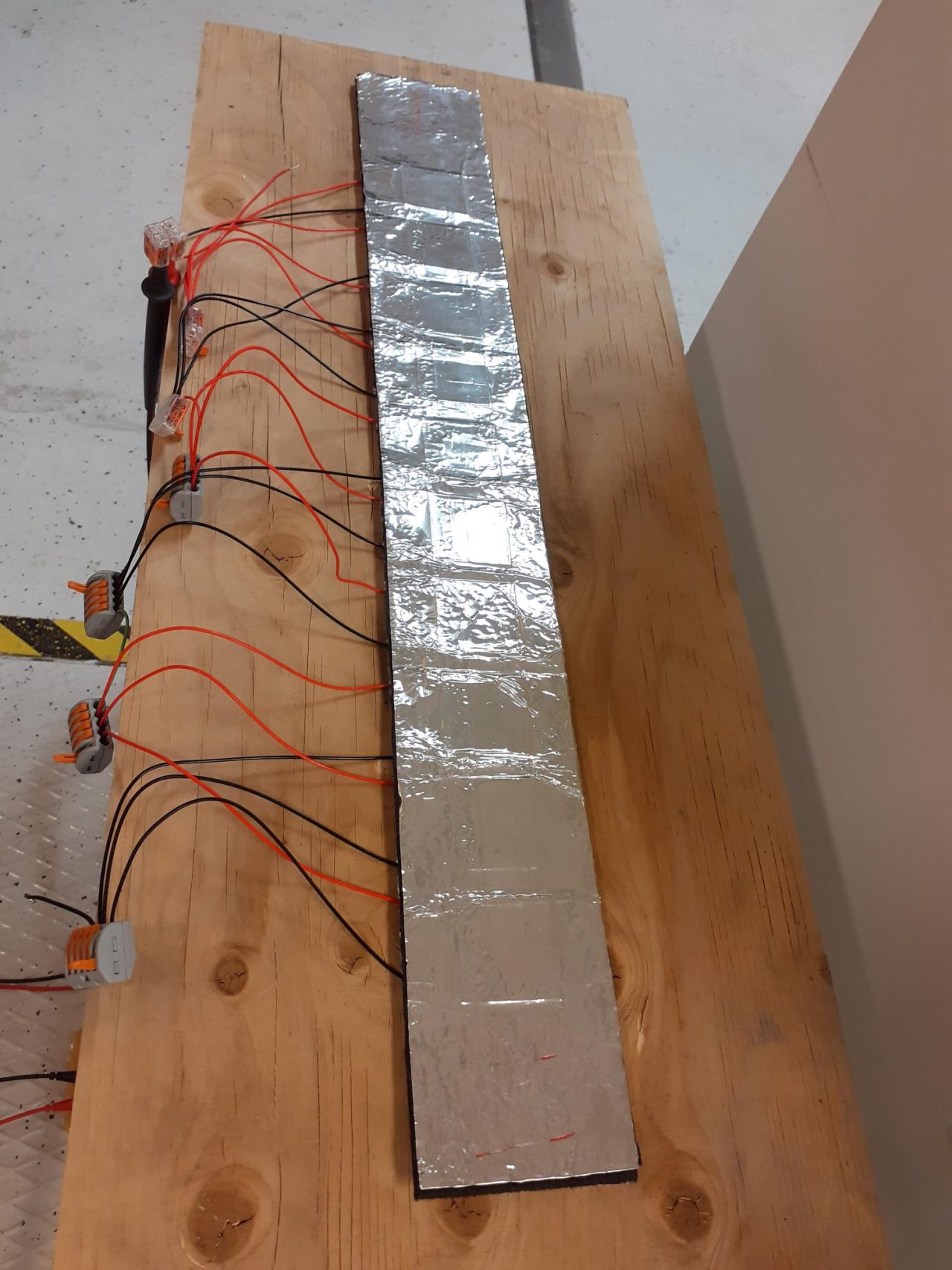
Kuva 2. Prototyyppi termoelektrisestä kaulapannasta
Lopuksi
Kattavan porovaroitusjärjestelmän luominen on hankalaa, koska nykyiset paikannuslaitteet eivät kykene tarpeeksi suureen paikannustiheyteen ja -tarkkuuteen suhteessa akun tai pariston kestoon. Energialähteen kokoa ei kuitenkaan voi kasvattaa loputtomasti, koska paikannin ei enää soveltuisi poron kannettavaksi. Ongelman ratkaisu vaatisi paristotekniikan kehitystä tai energian keräämistä esimerkiksi poron liike-energiasta.
Lähteet
Baseband Technologies 2022. Ultra Low-Power GPS Receiver Stamp-Sized Module. Viitattu 28.12.2022 https://www.basebandtech.com/wp-content/uploads/Datasheet-Stamp-sized-Ultra-Low-Power-GPS-Receiver-Module-rev-c.pdf.
LoRa Alliance™ Strategy Committee 2018. Geolocation Whitepaper. Viitattu 28.12.2022 https://hz137b.p3cdn1.secureserver.net/wp-content/uploads/2020/11/geolocation_whitepaper.pdf?time=1672162993.
Ould, S. & Bennett, N.S. 2021. Energy Performance Analysis and Modelling of LoRa Prototyping Boards. Sensors 2021, 21(23), 7992. Viitattu 28.12.2022 https://doi.org/10.3390/s21237992.
Van Dierendonck, K., Al-Fanek, O. & Petovello, M. 2018. What Is Snapshot Positioning and What Advantages Does It Offer? Inside GNSS Media & Research 6.12.2018. Viitattu 28.12.2022 https://insidegnss.com/what-is-snapshot-positioning-and-what-advantages-does-it-offer.
Asiasanat: energian kerääminen, langaton tiedonsiirto, paikannus, paristot, poro